LEHF, Pinces électriques, 2 doigts, Grande Course (LEHF32K2-64-R1AP1D)

Détails du produit:
Référence fabricant: LEHF32K2-64-R1AP1D
Marque: SMC
Prix: 2,060.91 €
Délai de livraison: 26 jours
Données techniques:
Mode de préhension: Pincement, type parallèle / Ouvert, type parallèle
Forme du corps principal: Forme latérale
Dimensions en position ouverte: 64 mm
Dimensions en position fermée: 0 mm
Force de préhension maximale (côté ouverture, type électrique): 120 N
(i)Remarque
- Product images are representative images. CAD data is not supported for some model numbers.
Référence pièce
Vous pouvez trouver ici le numéro
de référence lié au produit recherché.
LEHF32K2-64-R1AP1D
LEHF Series 2-Finger Type Electric Gripper Specifications

LEHF Series 2-Finger Type Electric Gripper external appearance
Features of LEHF Series 2-Finger Type Electric Gripper
Specifications
| Model | LEHF10 | LEHF20 | LEHF32 | LEHF40 | ||
|---|---|---|---|---|---|---|
| Actuator specifications | Open and close stroke / both sides (mm) | Basic | 16 | 24 | 32 | 40 |
| Long stroke | 32 | 48 | 64 | 80 | ||
| Lead (mm) | 40/15 (2.667) | 50/15 (3.333) | 70/16 (4.375) | 70/16 (4.375) | ||
| Gripping force (N)*1 *3 | 3 to 7 | 11 to 28 | 48 to 120 | 72 to 180 | ||
| Open and close speed / pushing speed (mm/s)*2 *3 | 5 to 80 / 5 to 20 | 5 to 100 / 5 to 30 | ||||
| Actuation type | Slide screw + belt | |||||
| Finger guide type | Linear guide (no circulation) | |||||
| Repeated length measurement accuracy (mm)*4 | ±0.05 | |||||
| Finger backlash / one side (mm)*5 | 0.5 or less | |||||
| Repeatability (mm)*6 | ±0.05 | |||||
| Positioning repeatability / one side (mm) | ±0.1 | |||||
| Lost motion / one side (mm)*7 | 0.3 or less | |||||
| Impact/vibration resistance (m/s2)*8 | 150/30 | |||||
| Max. operating frequency (C.P.M) | 60 | |||||
| Operating temp. range (°C) | 5 to 40 | |||||
| Operating humidity range (%RH) | 90 or less (no condensation) | |||||
| Weight (g) | Basic | 340 | 610 | 1,625 | 1,980 | |
| Long stroke | 370 | 750 | 1,970 | 2,500 | ||
| Electric specifications | Motor size | □20 | □28 | □42 | ||
| Motor type | Step motor (servo 24 V DC) | |||||
| Encoder | Incremental A/B phase (800 pulse/rotation) | |||||
| Rated voltage (V) | 24 V DC ±10% | |||||
| Power consumption / standby power consumption when operating (W)*9 | 11/7 | 28/15 | 34/13 | 36/13 | ||
| Max. instantaneous power consumption (W)*10 | 19 | 51 | 57 | 61 | ||
*1 Gripping force should be from 10 to 20 times the workpiece weight. Moving force should be 150% when releasing the workpiece. Gripping force accuracy should be: LEHF10: ±30% (F.S.), LEHF20: ±25% (F.S.), LEHF32/LEHF40: ±20% (F.S.). Gripping the workpiece with a heavy attachment and fast pushing speed may not satisfy the product specifications. In this case, decrease the weight and lower the pushing speed.
*2 Pushing speed should be set within the range during pushing (gripping) operation. Otherwise, it may cause malfunction. The open/close speed and pushing speed are for both fingers. The speed for one finger is 1/2 this value.
*3 The speed and force may change depending on the cable length, load, mounting conditions, etc. Furthermore, if the cable length exceeds 5 m, then the speed and force will decrease by up to 10% for each 5 m. (At 15 m: reduced by up to 20%)
*4 Repeated length measurement accuracy means dispersion (value on the controller monitor) when the workpiece is repeatedly held in the same position.
*5 There is no effect on the backlash during pushing (gripping). Make the stroke longer by the amount of backlash when opening.
*6 Repeatability means the variation of the gripping position (workpiece position) when the gripping operation is repeatedly performed in the same sequence for the same workpiece.
*7 A reference value for correcting an error in reciprocal operation which occurs during the positioning operation.
*8 Impact resistance: No malfunction occurred when the slide table was tested with a drop tester in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the gripper in the initial state.) Vibration resistance: No malfunction occurred in a test ranging from 45 to 2,000 Hz. Test was performed in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the actuator in the initial state.)
*9 The power consumption (including the controller) is for when the actuator is operating. The standby power consumption when operating is for when the gripper is stopped in the set position during operation (including energy-saving mode when gripping).
*10 The maximum instantaneous power consumption (including the controller) is for when the actuator is operating. This value can be used for the selection of the power supply.
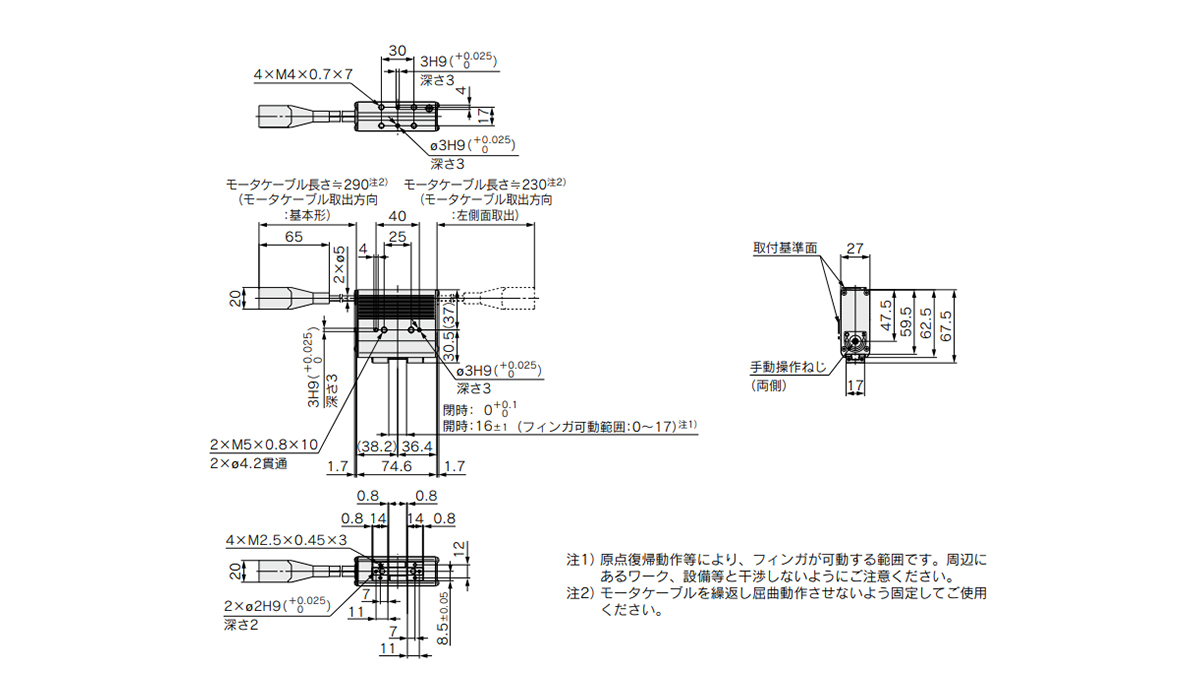
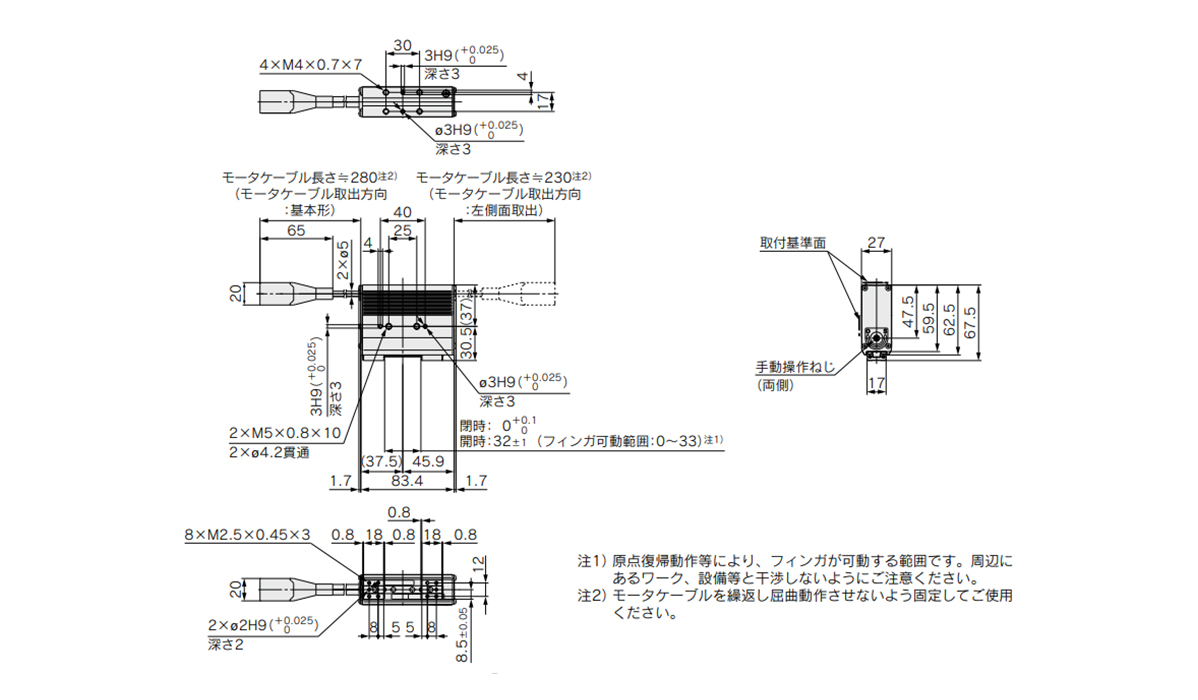
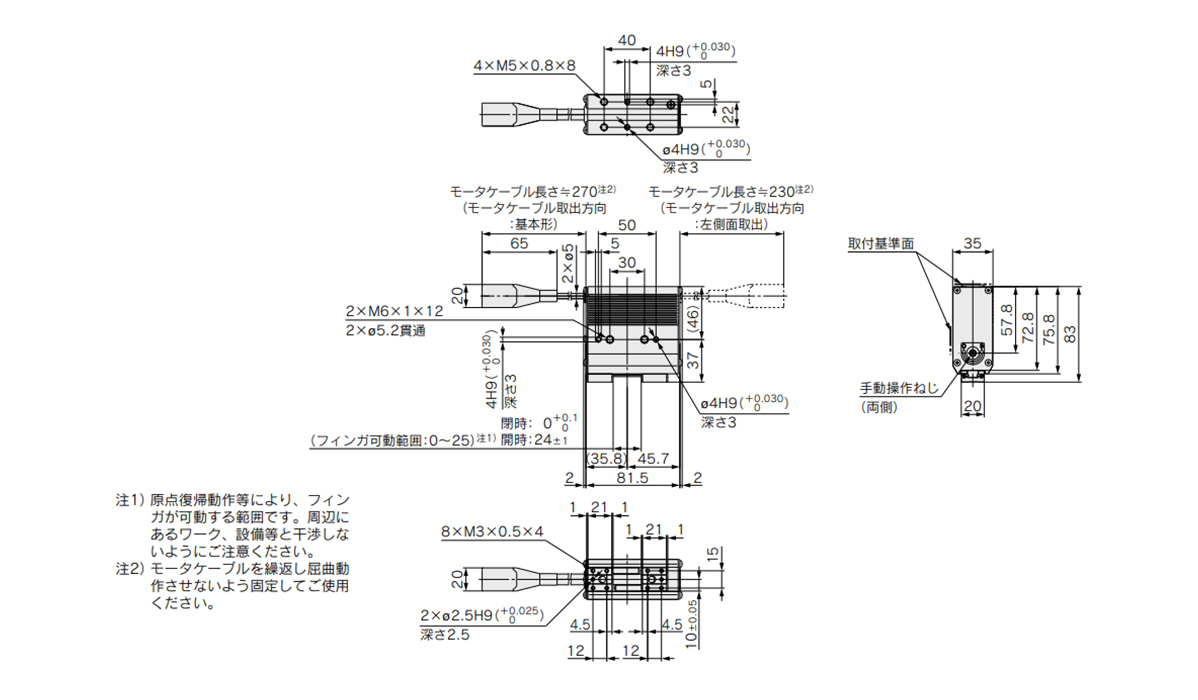
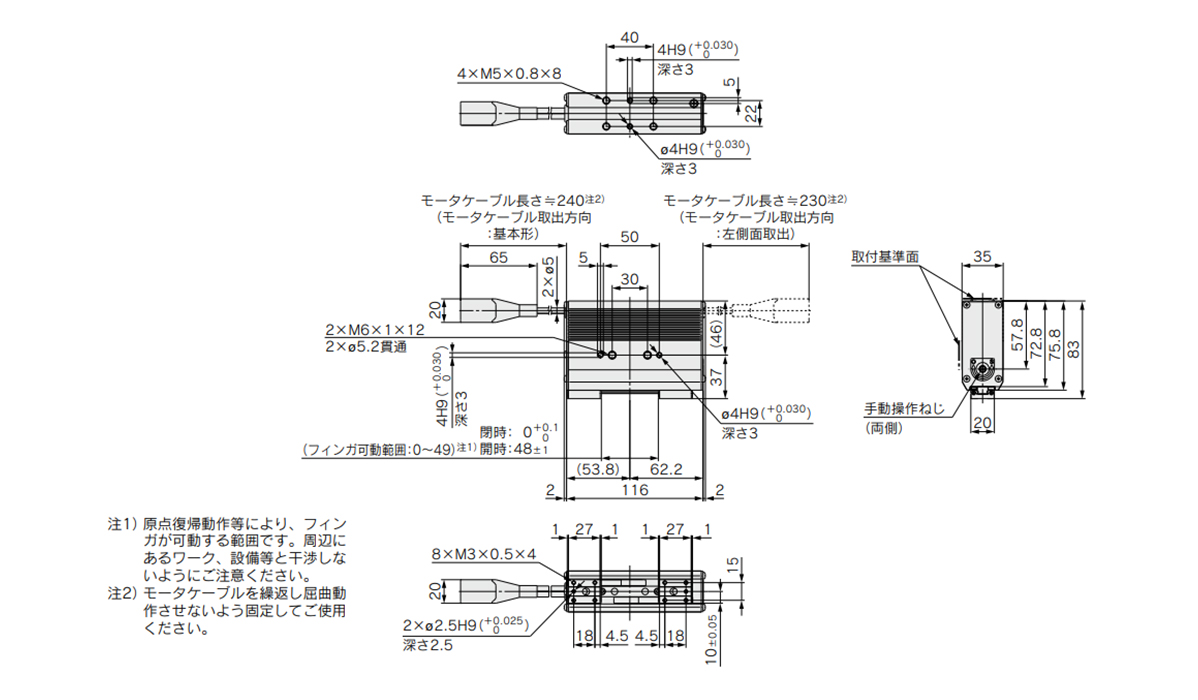
External dimensional drawing
(Unit: mm)
LEHF10K2-16 / basic dimensional drawing
LEHF10K2-32 / long stroke dimensional drawing
LEHF20K2-24 / basic dimensional drawing
LEHF20K2-48 / long stroke dimensional drawing
Common Cautions
*1 Range within which the finger can move when it returns to origin. Make sure the workpiece mounted on the finger does not interfere with the workpieces and equipment around the finger.
*2 Secure the motor cable so that it will not be bent repeatedly.
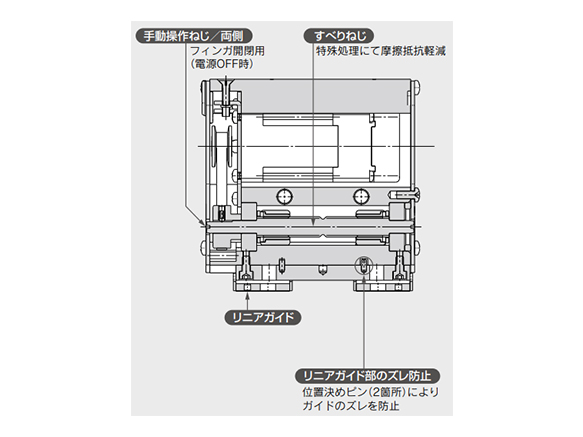
Structure drawing
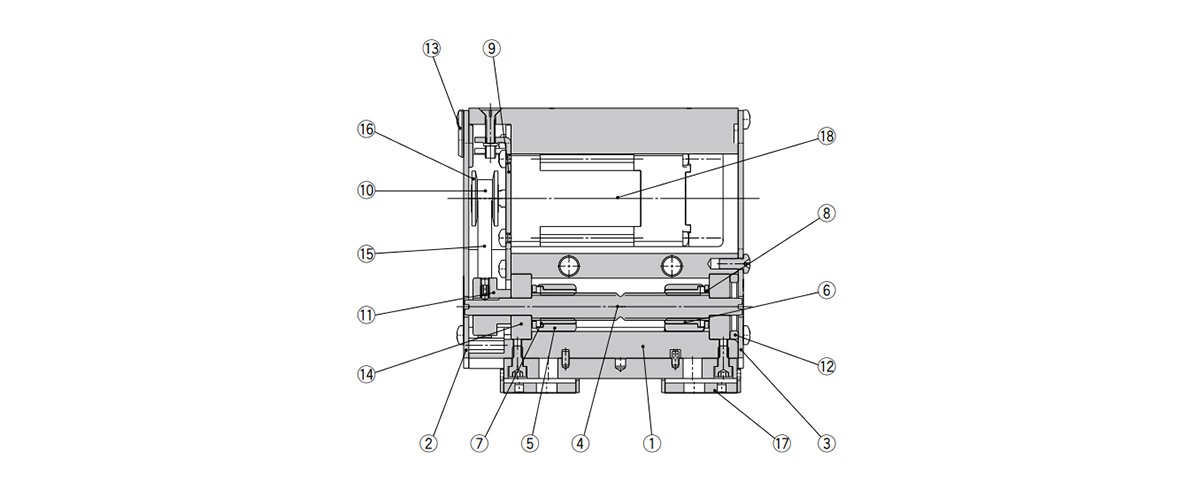
LEHF Series structure drawing
| No. | Description | Material | Note |
|---|---|---|---|
| 1 | Body | Aluminum alloy | Anodized |
| 2 | Side plate A | Aluminum alloy | Anodized |
| 3 | Side plate B | Aluminum alloy | Anodized |
| 4 | Slide shaft | Stainless steel | Heat treated + Specially treated |
| 5 | Slide bushing | Stainless steel | - |
| 6 | Slide nut | Stainless steel | Heat treated + Specially treated |
| 7 | Slide nut | Stainless steel | Heat treated + Specially treated |
| 8 | Fixed plate | Stainless steel | - |
| 9 | Motor plate | Carbon steel | - |
| 10 | Pulley A | Aluminum alloy | - |
| 11 | Pulley B | Aluminum alloy | - |
| 12 | Bearing stopper | Aluminum alloy | - |
| 13 | Rubber bushing | NBR | - |
| 14 | Bearing | - | - |
| 15 | Belt | - | - |
| 16 | Flange | - | - |
| 17 | Finger assembly | - | - |
| 18 | Step motor (servo 24 V DC) | - | - |
Mounting Method
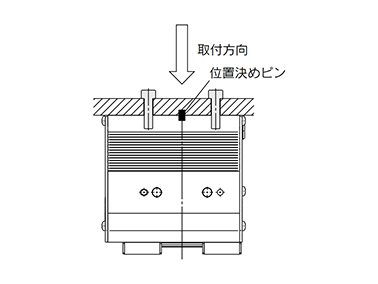
When using the thread on the body
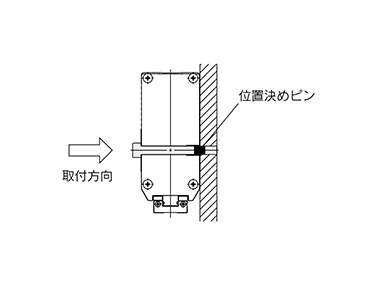
When using the thread on the mounting plate
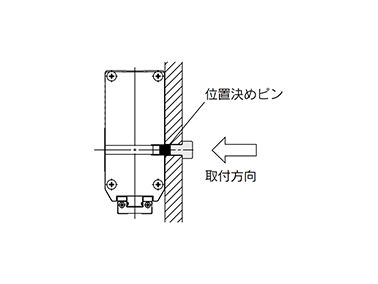
When using the thread on the back of the body
Precautions
- *The parameters of the stroke and the open/close speed are for both fingers.
- *The stroke and the open/close speed for one finger is 1/2 the set parameter.
- *When gripping a workpiece by the product, be sure to set to "Pushing."
- *Also, do not hit the workpiece with the finger and attachment during positioning or in the range of positioning. Otherwise, the lead screw can get caught and this may result in a malfunction. However, if the workpiece cannot be gripped when pushing (such as if the workpiece is a plastically deformed workpiece or rubber component, etc.), grip it when positioning giving consideration to the elastic force of the workpiece.
- *There is no effect on the backlash during pushing.
- *The return to origin is done by pushing. The finger position can be displaced by the effect of the backlash during positioning. This backlash displacement should be considered when setting the position.
- *See the manufacturer's catalog for product information other than the above.
- *Product images are representative images.
Référence pièce
|
|---|
| LEHF32K2-64-R1AP1D |
| Référence pièce |
Prix unitaire standard
| Quantité minimale de commande | Remise sur volume | Mode de préhension | Forme du corps principal | Dimensions en position ouverte (mm) | Dimensions en position fermée (mm) | Force de préhension maximale (côté ouverture, type électrique) (N) | Fonction supplémentaire | Force de préhension maximale (côté fermeture, type électrique) (N) | Taille | Course (mm) | Direction d'entrée du câble moteur | Type de câble d'actionneur | Longueur de câble d'actionneur | Type de contrôleur / pilote | Longueur de câble E/S | Méthode de montage de contrôleur / pilote | Fiche de communication | Protocole de communication | Câble | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
2,060.91 € | 1 | 26 jours | Pincement, type parallèle / Ouvert, type parallèle | Forme latérale | 64 | 0 | 120 | Avec guide linéaire | 120 | 32 | 64 | Entrée sur le côté droit | Câble robotique | 1,5 m | Type à entrée d’impulsions PNP | 1,5 m | Montage sur rail DIN | Aucun | - | - |
Loading...
Informations de base
| Type | Corps principal (type électrique) | Nombre de doigts | 2 pièces | Environnement, applications | Standard |
|---|---|---|---|---|---|
| Mécanisme de réglage de la course | Ajustement double ouvert / fermé |
Vous vous trouvez sur la page de LEHF, Pinces électriques, 2 doigts, Grande Course, le numéro d'article est le suivant: LEHF32K2-64-R1AP1D.
Veuillez trouver plus de détails concernant les particularités et les dimensions sous le numéro d'article LEHF32K2-64-R1AP1D.
Configurer
Propriétés de base
-
Mode de préhension
- Pincement, type parallèle
- Ouvert, type parallèle
- Main mécanique
-
Protocole de communication
- DeviceNet (TM)
- EtherCAT (R)
- EtherNet/IP (TM)
- PROFINET
- Sans
-
Câble
- Type standard
-
Type
- LEHF10
- LEHF20
- LEHF32
- LEHF40
-
Forme du corps principal
- Forme carrée
- Forme latérale
-
Dimensions en position ouverte(mm)
-
Dimensions en position fermée(mm)
-
Force de préhension maximale (côté ouverture, type électrique)(N)
-
Fonction supplémentaire
- Avec guide linéaire
- Haute précision
- Type antichute
- Fonction de réglage de la course
- Contrôle de la force de préhension
- Régulation de vitesse
-
Force de préhension maximale (côté fermeture, type électrique)(N)
-
Taille
- 10
- 20
- 32
- 40
-
Course(mm)
-
Direction d'entrée du câble moteur
- Entry on the left side
- Entrée sur le côté droit
-
Type de câble d'actionneur
- Câble robotique
- Câble standard
- Sans
-
Longueur de câble d'actionneur
- 1,5 m
- 3 m
- 5 m
- 8 m
- 10 m
- 15 m
- Sans
-
Type de contrôleur / pilote
- JXCD1 (type à entrée directe DeviceNet)
- JXCE1 (type à entrée directe EtherCAT)
- JXCP1 (type à entrée directe PROFINET)
- LECP1 (sans programmation) / PNP
- JXC91 (type à entrée directe EtherNet/IP)
- Sans
- Type d'entrée de données de pas PNP
- Type sans programme PNP
- Type à entrée d’impulsions NPN
- Type à entrée d’impulsions PNP
-
Longueur de câble E/S
- 1,5 m
- 3 m
- 5 m
- Sans
-
Méthode de montage de contrôleur / pilote
- Montage par vis
- Montage sur rail DIN
-
Fiche de communication
- Aucun
- Connecteur de communication rectiligne
-
Filtrer par type de données CAO
- 2D
- 3D
Filtrer par jours d'expédition standard
-
- Tous les articles
- 26 jours ou moins
Propriétés optionnelles
- Les spécifications et les dimensions de certaines pièces peuvent ne pas être intégralement indiquées. Pour plus de détails, reportez-vous aux catalogues des fabricants .
Variantes de ce produit
| Référence pièce |
|---|
| LEHF10K2-16-R31P1 |
| LEHF10K2-16-R3CE18 |
| LEHF10K2-16-R3CP18 |
| LEHF32K2-64-R1AP3D |
| LEHF32K2-64-R1APD |
| LEHF32K2-64-R1CP18 |
| Référence pièce | Prix unitaire standard | Quantité minimale de commande | Remise sur volume | Jour d'expédition standard ? | Mode de préhension | Forme du corps principal | Dimensions en position ouverte (mm) | Dimensions en position fermée (mm) | Force de préhension maximale (côté ouverture, type électrique) (N) | Fonction supplémentaire | Force de préhension maximale (côté fermeture, type électrique) (N) | Taille | Course (mm) | Direction d'entrée du câble moteur | Type de câble d'actionneur | Longueur de câble d'actionneur | Type de contrôleur / pilote | Longueur de câble E/S | Méthode de montage de contrôleur / pilote | Fiche de communication | Protocole de communication | Câble |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
1,706.39 € | 1 | 26 jours | Ouvert, type parallèle / Pincement, type parallèle | Forme latérale | 16 | 0 | 7 | Avec guide linéaire | 7 | 10 | 16 | Entrée sur le côté droit | Câble robotique | 3 m | Type sans programme PNP | 1,5 m | Montage par vis | Aucun | - | - | ||
2,075.26 € | 1 | 26 jours | Main mécanique / Ouvert, type parallèle / Pincement, type parallèle | Forme carrée | - | - | 7 | Haute précision / Type antichute / Avec guide linéaire / Régulation de vitesse / Fonction de réglage de la course / Contrôle de la force de préhension | 7 | 10 | 16 | Entrée sur le côté droit | Câble robotique | 3 m | JXCE1 (type à entrée directe EtherCAT) | Sans | Montage sur rail DIN | Aucun | EtherCAT (R) | Type standard | ||
2,100.50 € | 1 | 26 jours | Main mécanique / Ouvert, type parallèle / Pincement, type parallèle | Forme carrée | - | - | 7 | Haute précision / Type antichute / Avec guide linéaire / Régulation de vitesse / Fonction de réglage de la course / Contrôle de la force de préhension | 7 | 10 | 16 | Entrée sur le côté droit | Câble robotique | 3 m | JXCP1 (type à entrée directe PROFINET) | Sans | Montage sur rail DIN | Aucun | PROFINET | Type standard | ||
2,045.46 € | 1 | 26 jours | Ouvert, type parallèle / Pincement, type parallèle | Forme latérale | 64 | 0 | 120 | Avec guide linéaire | 120 | 32 | 64 | Entrée sur le côté droit | Câble robotique | 1,5 m | Type à entrée d’impulsions PNP | 3 m | Montage sur rail DIN | Aucun | - | - | ||
1,990.74 € | 1 | 26 jours | Ouvert, type parallèle / Pincement, type parallèle | Forme latérale | 64 | 0 | 120 | Avec guide linéaire | 120 | 32 | 64 | Entrée sur le côté droit | Câble robotique | 1,5 m | Type à entrée d’impulsions PNP | Sans | Montage sur rail DIN | Aucun | - | - | ||
2,514.59 € | 1 | 26 jours | Main mécanique / Ouvert, type parallèle / Pincement, type parallèle | Forme carrée | 64 | - | 120 | Haute précision / Type antichute / Avec guide linéaire / Régulation de vitesse / Fonction de réglage de la course / Contrôle de la force de préhension | 120 | 32 | 64 | Entrée sur le côté droit | Câble robotique | 1,5 m | JXCP1 (type à entrée directe PROFINET) | Sans | Montage sur rail DIN | Aucun | PROFINET | Type standard |
Assistance technique
Mode de paiement



Fabrication à la demande
Certificats





Copyright © MISUMI Corporation All Rights Reserved.