LER, Table rotative électrique (LER10J)

Détails du produit:
Référence fabricant: LER10J
Marque: SMC
Prix: 850.20 €
Délai de livraison: 7 jours
Données techniques:
Angle d'oscillation A: 310°
Couple: Moins de 1 N▪m
Couple: 0.22 N▪m
Rigidité et précision: Standard
Taille: 10
(i)Remarque
- Refer to the manufacturer's catalog for specification and material details.
- Product images may be representative images. Refer to the manufacturer's catalog for shape details.
- CAD data is not supported for some model numbers.
Référence pièce
Vous pouvez trouver ici le numéro
de référence lié au produit recherché.
LER10J
LER Series Electric Rotary Table Specifications

LER Series Electric Rotary Table external appearance
LER: basic type / LERH: high-precision type
External dimensional drawing
(Unit: mm)
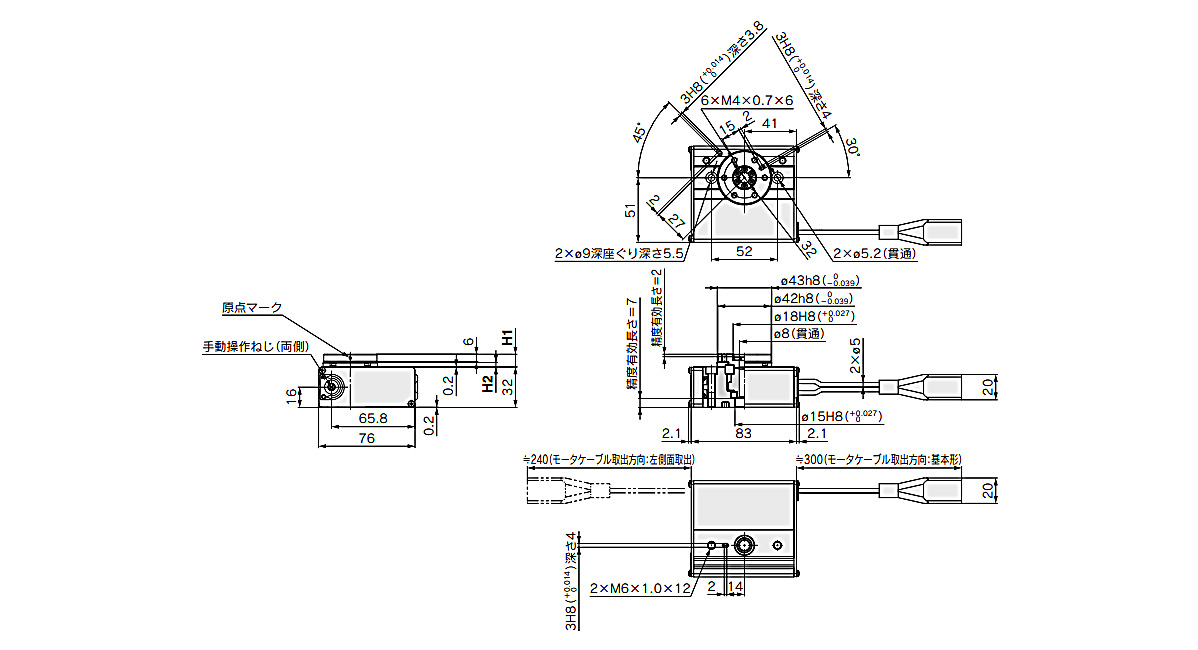
LER□10□ (rotation angle: 310°) dimensional drawing
- LER10 / H1: 10 mm, H2: 3.5 mm
- LERH10 / H1: 17 mm, H2: 10.5 mm
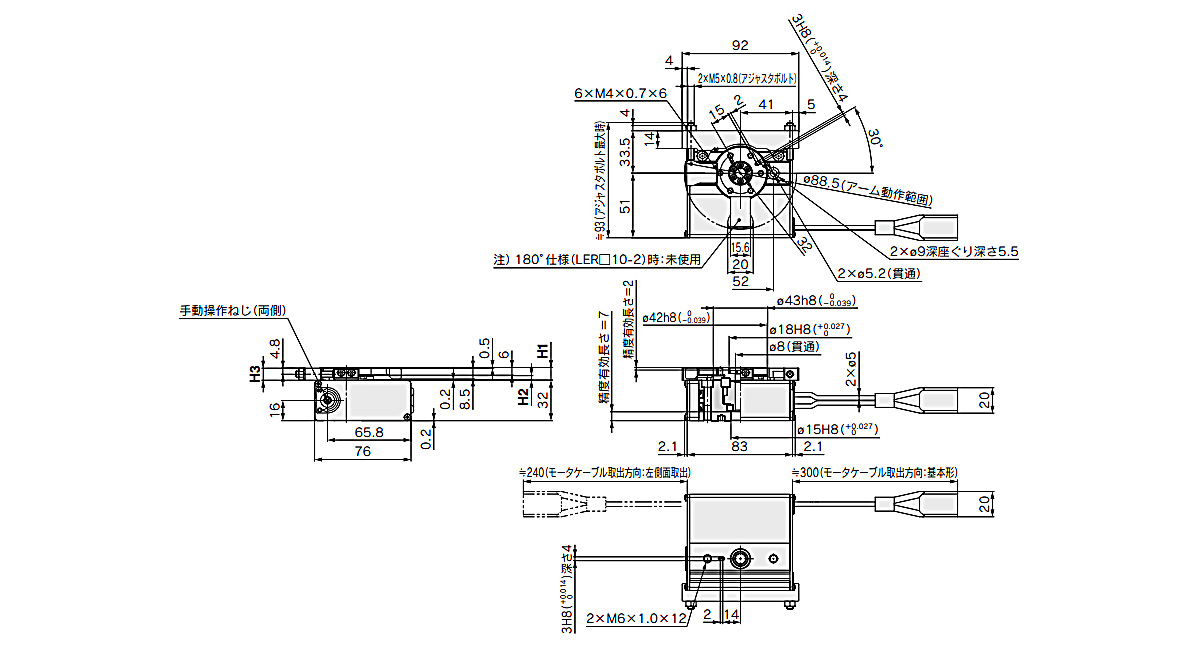
LER□10-2 (rotation angle: 180°) / LER□10-3 (rotation angle: 90°) dimensional drawings
- LER10 / H1: 10 mm, H2: 3.5 mm, H3: 9 mm
- LERH10 / H1: 17 mm, H2: 10.5 mm, H3: 16 mm
Specifications / Step Motor (Servo 24 V DC)
| Model | LER□10K | LER□10J | LER□30K | LER□30J | LER□50K | LER□50J | |||
|---|---|---|---|---|---|---|---|---|---|
| Actuator specifications: basic type | Rotation angle (°) | 310 | 320 | ||||||
| Lead (°) | 8 | 12 | 8 | 12 | 7.5 | 12 | |||
| Max. rotating torque (N·m) | 0.32 | 0.22 | 1.2 | 0.8 | 10 | 6.6 | |||
| Max. pushing torque 40 to 50% (N·m)*1 *3 | 0.13 to 0.16 | 0.09 to 0.11 | 0.48 to 0.60 | 0.32 to 0.40 | 4.0 to 5.0 | 2.6 to 3.3 | |||
| Max. moment of inertia (kg·m2)*2 *3 | LECP6/LECP1/LECPMJ JXCE1/91/P1/D1 | 0.0040 | 0.0018 | 0.035 | 0.015 | 0.13 | 0.05 | ||
| LECPA JXC73/83/93 | 0.027 | 0.012 | 0.10 | 0.04 | |||||
| Angular speed (°/sec)*2 *3 | 20 to 280 | 30 to 420 | 20 to 280 | 30 to 420 | 20 to 280 | 30 to 420 | |||
| Pushing speed (°/sec) | 20 | 30 | 20 | 30 | 20 | 30 | |||
| Max. angular acceleration/deceleration (°/sec2)*2 | 3,000 | ||||||||
| Backlash (°) | Basic type | ±0.3 | ±0.2 | ||||||
| High-precision type | ±0.1 | ||||||||
| Positioning repeatability (°) | Basic type | ±0.05 | ±0.05 | ||||||
| High-precision type | ±0.03 | ||||||||
| Lost motion (°)*4 | Basic type | 0.3 or less | 0.3 or less | ||||||
| High-precision type | 0.2 or less | ||||||||
| Impact/vibration resistance (m/s2)*5 | 150/30 | ||||||||
| Actuation type | Special worm gear + belt drive | ||||||||
| Max. operating frequency (c.p.m) | 60 | ||||||||
| Operating temp. range (°C) | 5 to 40 | ||||||||
| Operating humidity range (%RH) | 90 or less (no condensation) | ||||||||
| Weight (kg) | Basic type | 0.49 | 1.1 | 2.2 | |||||
| High-precision type | 0.54 | 1.2 | 2.4 | ||||||
| External stopper type | Rotation angle (°) | -2/arm (1 pc.) | 180 | ||||||
| -3 / arm (2 pcs.) | 90 | ||||||||
| Repeatability at the end (°) / with external stopper | ±0.01 | ||||||||
| External stopper setting range (°) | ±2 | ||||||||
| Weight (kg) | -2 / external arm (1 pc.) | Basic type | 0.55 | 1.2 | 2.5 | ||||
| High-precision type | 0.61 | 1.4 | 2.7 | ||||||
| -3 / external arm (1 pc.) | Basic type | 0.57 | 1.2 | 2.6 | |||||
| High-precision type | 0.63 | 1.4 | 2.8 | ||||||
| Electric specifications | Motor size | □20 | □28 | □42 | |||||
| Motor type | Step motor (servo 24 V DC) | ||||||||
| Encoder | Incremental A/B phase (800 pulse/rotation) | ||||||||
| Power supply (V) | 24 V DC ±10% | ||||||||
| Power consumption (W)*6 | 11 | 22 | 34 | ||||||
| Standby power consumption when operating (W)*7 | 7 | 12 | 13 | ||||||
| Max. instantaneous power consumption (W)*8 | 14 | 42 | 57 | ||||||
*1 Pushing force accuracy is LER10: ±30% (F.S.), LER30: ±25% (F.S.), LER50: ±20% (F.S.).
*2 The angular acceleration, angular deceleration and angular speed may fluctuate due to variations in the moment of inertia. Refer to the "Moment of Inertia—Angular Acceleration/Deceleration, Effective Torque—Angular Speed" graphs on pp. 406 and 407 for confirmation.
*3 The speed and force may change depending on the cable length, load, mounting conditions, etc. Furthermore, if the cable length exceeds 5 m, then the speed and force will decrease by up to 10% for each 5 m. (At 15 m: reduced by up to 20%)
*4 A reference value for correcting an error in reciprocal operation.
*5 Impact resistance: No malfunction occurred when the slide table was tested with a drop tester in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the actuator in the initial state.)
Vibration resistance: No malfunction occurred in a test ranging from 45 to 2,000 Hz. Test was performed in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the actuator in the initial state.)
*6 The power consumption (including the controller) is for when the actuator is operating.
*7 The standby power consumption when operating (including the controller) is for when the actuator is stopped in the set position during operation.
*8 The maximum instantaneous power consumption (including the controller) is for when the actuator is operating. This value can be used for the selection of the power supply.
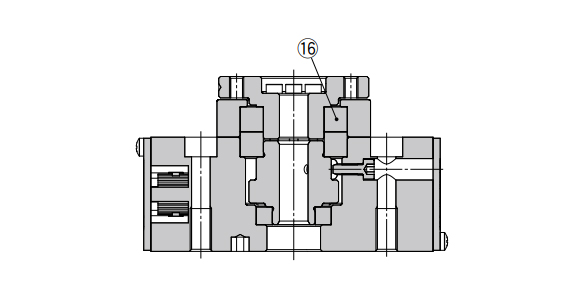
Structure drawing
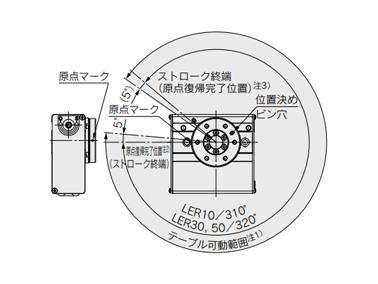
Table rotation angle range
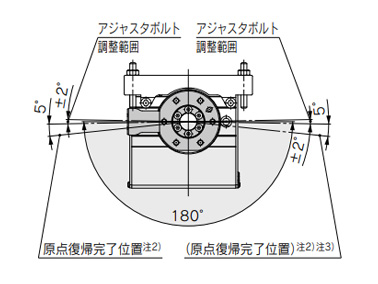
External stopper: 180°
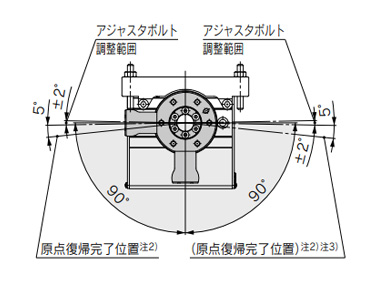
External stopper: 90°
*The figures show the origin position for each actuator.
*1 Range within which the table can move when it returns to origin. Make sure the workpiece mounted on the table does not interfere with the workpieces and equipment around the table.
*2 Position after return to origin. The position varies depending on whether there is an external stopper.
*3 Element in parentheses applies when the direction of return to origin has changed.
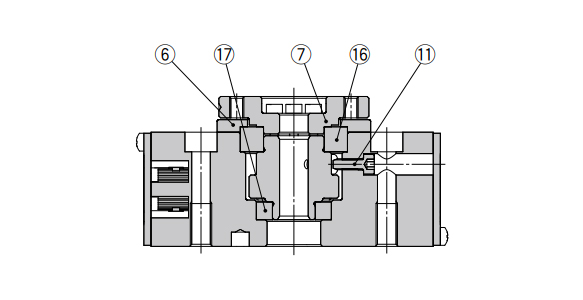
Structure drawing
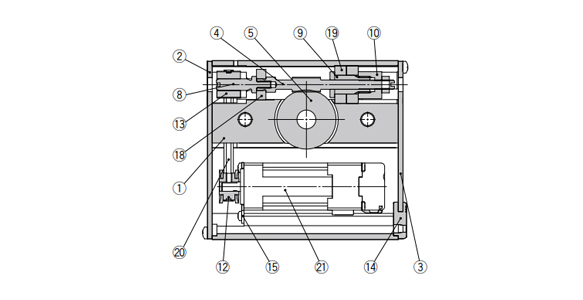
LER Series Electric Rotary Table structure drawing
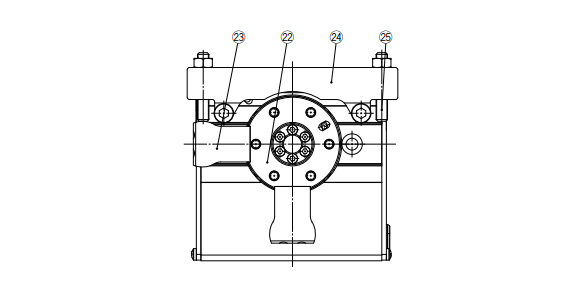
External stopper type structure drawing
Basic type structure drawing
High-precision type structure drawing
| No. | Description | Material | Note | |
|---|---|---|---|---|
| 1 | Body | Aluminum alloy | Anodized | |
| 2 | Side plate A | Aluminum alloy | Anodized | |
| 3 | Side plate B | Aluminum alloy | Anodized | |
| 4 | Worm screw | Stainless steel | Heat treated + Specially treated | |
| 5 | Worm wheel | Stainless steel | Heat treated + Specially treated | |
| 6 | Bearing cover | Aluminum alloy | Anodized | |
| 7 | Table | Aluminum alloy | - | |
| 8 | Joint | Stainless steel | - | |
| 9 | Bearing holder | Aluminum alloy | - | |
| 10 | Bearing stopper | Aluminum alloy | - | |
| 11 | Origin bolt | Carbon steel | - | |
| 12 | Pulley A | Aluminum alloy | - | |
| 13 | Pulley B | Aluminum alloy | - | |
| 14 | Grommet | NBR | - | |
| 15 | Motor plate | Carbon steel | - | |
| 16 | Basic type | Deep groove ball bearing | - | - |
| High-precision type | Special ball bearing | - | ||
| 17 | Deep groove ball bearing | - | - | |
| 18 | Deep groove ball bearing | - | - | |
| 19 | Deep groove ball bearing | - | - | |
| 20 | Belt | - | - | |
| 21 | Step motor (servo 24 V DC) | - | - | |
| 22 | Table | Aluminum alloy | Anodized | |
| 23 | Arm | Carbon steel | Heat treated + Electroless nickel treated | |
| 24 | Holder | Aluminum alloy | Anodized | |
| 25 | Adjuster bolt | Carbon steel | Heat treated + Chromate treated | |
Precautions
Design/Selection
- *If the operating conditions involve load fluctuations, ascending/descending movements, or changes in the frictional resistance, ensure that safety measures are in place to prevent injury to the operator or damage to the equipment. Failure to provide such measures could accelerate the operation speed, which may be hazardous to humans, machinery and other equipment.
- *Power failure may result in a decrease in the pushing force; ensure that safety measures are in place to prevent injury to the operator or damage to the equipment. When the product is used for clamping, the clamping force could be decreased due to power failure, potentially creating a hazardous situation in which the workpiece is released.
- *If the operating speed is set too fast and the moment of inertia is too large, the product could be damaged. Set appropriate product operating conditions in accordance with the model selection procedure.
- *If more precise repeatability of the rotation angle is required, use the product with an external stopper (180° ±2°, 90° ±2°) or by directly stopping the workpiece using an external object utilizing the pushing operation.
- *When using the electric rotary table with an external stopper, or by directly stopping the load externally, be sure to set to [Pushing operation]. Also, ensure that the workpiece is not impacted externally during the positioning operation or in the range of positioning operation.
Mounting
- *Do not drop or hit the electric rotary table to avoid scratching and denting the mounting surfaces. Even slight deformation can cause the deterioration of accuracy and operation failure.
- *When mounting the load, tighten the mounting screws within the specified torque range. Tightening the screws with a higher torque than recommended may cause malfunction, while tightening with a lower torque can cause displacement of the mounting position.
- *When mounting the electric rotary table, tighten the mounting screws within the specified torque range. Tightening the screws with a higher torque than recommended may cause malfunction, while tightening with a lower torque can cause displacement of the mounting position.
Mounting the workpiece to the electric rotary table
The load should be mounted to the product by screwing the screw into the female mounting thread. See the table below for appropriate tightening torque and screw length. If the threaded portion is too long, it can interfere with the body and cause a malfunction.
| Model | Screw size | Thread length (mm) | Max. tightening torque (N·m) |
|---|---|---|---|
| LER□10 | M4 ×; 0.7 | 6 | 1.4 |
| LER□30 | M5 ×; 0.8 | 8 | 3.0 |
| LER□50 | M6 ×; 1 | 10 | 5.0 |
- *See the manufacturer's catalog for product information other than the above.
- *Product images are representative images.
Référence pièce
|
|---|
| LER10J |
| Référence pièce | Relatif à |
Prix unitaire standard
| Quantité minimale de commande | Remise sur volume | Angle d'oscillation A | Couple (N▪m) | Couple (N▪m) | Rigidité et précision | Taille | Direction d'entrée du câble moteur | Type de câble d'actionneur | Longueur de câble d'actionneur (m) | Type de contrôleur / pilote | Longueur de câble E/S, fiche de communication (m) | Méthode de montage de contrôleur / pilote | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
850.20 € | 1 | 7 jours | 310° | Moins de 1 | 0.22 | Standard | 10 | Type de base (entrée sur le côté droit) | Sans câble | Sans câble | Sans contrôleur/pilote | Sans câble (sans connecteur de communication) | Montage par vis |
Loading...
Informations de base
| Type | Sortie d'axe de l'actionneur rotatif sur un côté | Forme du corps principal | Forme de bloc | Environnement de fonctionnement, applications | Vitesse élevée |
|---|---|---|---|---|---|
| Vanne | N/A |
Vous vous trouvez sur la page de LER, Table rotative électrique, le numéro d'article est le suivant: LER10J.
Veuillez trouver plus de détails concernant les particularités et les dimensions sous le numéro d'article LER10J.
Configurer
Propriétés de base
-
Type
- LER
- LERH
-
Angle d'oscillation A
- 90°
- 180°
- 310°
- 320°
- 90°
-
Couple(N▪m)
- Moins de 1
- 1 à moins de 3
- 6 à moins de 10
- 10 à moins de 20
-
Couple(N▪m)
-
Rigidité et précision
- Standard
- Rigidité élevée / haute précision
-
Taille
-
Direction d'entrée du câble moteur
- Entrée côté gauche
- Type de base (entrée sur le côté droit)
-
Type de câble d'actionneur
- Câble robotique (flexible)
- Câble standard
- Sans câble
-
Longueur de câble d'actionneur(m)
- 1.5
- 3
- 5
- 8
- 10
- 15
- 20
- Sans câble
-
Type de contrôleur / pilote
- LECP1 (sans programmation) / NPN
- LECP1 (sans programmation) / PNP
- LECP6 (type d'entrée de données de pas) / PNP
- LECPA (entrées impulsionnelles) / NPN
- LECPA (entrées impulsionnelles) / PNP
- Sans contrôleur/pilote
-
Longueur de câble E/S, fiche de communication(m)
- 1.5
- 3
- 5
- Sans câble (sans connecteur de communication)
-
Méthode de montage de contrôleur / pilote
- Montage par vis
- Montage sur rail DIN
-
Filtrer par type de données CAO
- 2D
- 3D
Filtrer par jours d'expédition standard
-
- Tous les articles
- 7 jours ou moins
- 9 jours ou moins
- 26 jours ou moins
Propriétés optionnelles
- Les spécifications et les dimensions de certaines pièces peuvent ne pas être intégralement indiquées. Pour plus de détails, reportez-vous aux catalogues des fabricants .
Variantes de ce produit
| Référence pièce |
|---|
| LER10J-2 |
| LER10J-2-R1 |
| LER10J-2-R3 |
| LER10J-2-R31P1 |
| LER10J-2-R51P3 |
| LER10J-2-S1 |
| Référence pièce | Relatif à | Prix unitaire standard | Quantité minimale de commande | Remise sur volume | Jour d'expédition standard ? | Angle d'oscillation A | Couple (N▪m) | Couple (N▪m) | Rigidité et précision | Taille | Direction d'entrée du câble moteur | Type de câble d'actionneur | Longueur de câble d'actionneur (m) | Type de contrôleur / pilote | Longueur de câble E/S, fiche de communication (m) | Méthode de montage de contrôleur / pilote |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
1,043.59 € | 1 | 9 jours | [180°] Caoutchouc de silicone conducteur | Moins de 1 | 0.22 | Standard | 10 | Type de base (entrée sur le côté droit) | Sans câble | Sans câble | Sans contrôleur/pilote | Sans câble (sans connecteur de communication) | Montage par vis | |||
1,150.86 € | 1 | 9 jours | [180°] Caoutchouc de silicone conducteur | Moins de 1 | 0.22 | Standard | 10 | Type de base (entrée sur le côté droit) | Câble robotique (flexible) | 1.5 | Sans contrôleur/pilote | Sans câble (sans connecteur de communication) | Montage par vis | |||
1,186.40 € | 1 | 9 jours | [180°] Caoutchouc de silicone conducteur | Moins de 1 | 0.22 | Standard | 10 | Type de base (entrée sur le côté droit) | Câble robotique (flexible) | 3 | Sans contrôleur/pilote | Sans câble (sans connecteur de communication) | Montage par vis | |||
| - | 1,549.47 € | 1 | 9 jours | [180°] Caoutchouc de silicone conducteur | Moins de 1 | 0.22 | Standard | 10 | Type de base (entrée sur le côté droit) | Câble robotique (flexible) | 3 | LECP1 (sans programmation) / PNP | 1.5 | Montage par vis | ||
| - | 1,645.30 € | 1 | 9 jours | [180°] Caoutchouc de silicone conducteur | Moins de 1 | 0.22 | Standard | 10 | Type de base (entrée sur le côté droit) | Câble robotique (flexible) | 5 | LECP1 (sans programmation) / PNP | 3 | Montage par vis | ||
1,121.24 € | 1 | 9 jours | [180°] Caoutchouc de silicone conducteur | Moins de 1 | 0.22 | Standard | 10 | Type de base (entrée sur le côté droit) | Câble standard | 1.5 | Sans contrôleur/pilote | Sans câble (sans connecteur de communication) | Montage par vis |
Assistance technique
Mode de paiement



Fabrication à la demande
Certificats





Copyright © MISUMI Corporation All Rights Reserved.