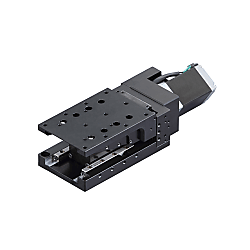
Table de réglage de Guides à rouleaux croisés en Z (KHC) (Numéros de référence - Téléchargement CAO)
Cliquez sur cette image pour l'agrandir.
Cliquez sur cette image pour l'agrandir.


- Remise sur volume
[Applications] · réglage de précision des caméras, microscopes, capteurs et composants optiques
· Pour le positionnement pendant les processus de production, d’assemblage et d'inspection liés aux semi-conducteurs et aux instruments de mesure
Référence pièce
Vous pouvez trouver ici le numéro
de référence lié au produit recherché.
KHC07004F-7
Référence pièce
|
|---|
| KHC07004F-7 |
| Référence pièce |
Prix unitaire standard
| Quantité minimale de commande | Remise sur volume | Longueur de la table (mm) | Largeur de la table (mm) | Finitions de la surface de la table | Option de câble | Poids propre (kg) | Accessoires | |
|---|---|---|---|---|---|---|---|---|---|---|
2,555.39 € | 1 | Disponible | 9 jours | 70 | 70 | Aluminium anodisé transparent | 7 : Câble robot 4 m, Connecteurs aux deux extrémités | 1.18 | Boulon à tête hexagonale manchon M4-6 × 4 pièces / Câble robot, 4 m, Connecteur aux deux extrémités |
Loading...
Informations de base
| Type | Table de positionnement, axe des Z | Caractéristiques moteur / poulie | Moteur pas à pas 5 phases standard | Matériaux de la table | Aluminium |
|---|---|---|---|---|---|
| Guide de déplacement | Guides à rouleaux croisés | Méthode d'alimentation | Vis à billes | Distance de déplacement, axe des Z(mm) | 4 |
| Surface de platine, axe des Z | Horizontale | Capacité de charge (plage)(N) | 50.1 to 100 | Résistance à la charge(N) | 68.6 |
| Vitesse max.(mm / s) | 2.5 | Précision de positionnement unidirectionnel, axe simple(µm) | 7 | Parallélisme(µm) | 50 |
| Rigidité du moment (tangage), en cas d'axe simple(" / N·cm) | 0.2 | Rigidité du moment (lacet), en cas d'axe simple(" / N·cm) | 0.04 | Rigidité du moment (roulis), en cas d'axe simple(" / N·cm) | 0.14 |
| Capteur | Limite + position de repos | Sélection du fil(mm) | 1 | Répétabilité du positionnement(±chiffres) | 0.5 |
| Mouvement perdu(μm) | 1 | Spécifications de la graisse lubrifiante | Vide : graisse lubrifiante standard | Résolution | Plein 0,5 µm / moitié 0,25 µm |
Vous vous trouvez sur la page de Table de réglage de Guides à rouleaux croisés en Z (KHC), le numéro d'article est le suivant: KHC07004F-7.
Veuillez trouver plus de détails concernant les particularités et les dimensions sous le numéro d'article KHC07004F-7.
Configurer
Propriétés de base
-
Longueur de la table(mm)
-
Largeur de la table(mm)
-
Finitions de la surface de la table
- Aluminium anodisé noir
- Aluminium anodisé transparent
-
Option de câble
- 1 : Câble standard 2 m, discret à une extrémité
- Vide : Câble standard 2 m, Connecteur aux deux extrémités
- 2 : Câble standard 4 m, Connecteur aux deux extrémités
- 3 : Câble standard 4 m, discret à une extrémité
- 4 :Connecteur uniquement
- 5 :Sans câble
- 6 : Câble robot 2 m, Connecteurs aux deux extrémités
- 7 : Câble robot 4 m, Connecteurs aux deux extrémités
- 8 : Câble robot 4 m, discret à une extrémité
- 9 : Câble robot 2 m, discret à une extrémité
-
Filtrer par type de données CAO
Filtrer par jours d'expédition standard
-
- Tous les articles
- 9 jours ou moins
- 10 jours ou moins
Propriétés optionnelles
- Les spécifications et les dimensions de certaines pièces peuvent ne pas être intégralement indiquées. Pour plus de détails, reportez-vous aux catalogues des fabricants .
Variantes de ce produit
| Référence pièce |
|---|
| KHC06004F-3 |
| KHC06004F-4 |
| KHC06004F-5 |
| KHC06004F-6 |
| KHC07004F-8 |
| KHC07004F-9 |
| Référence pièce | Prix unitaire standard | Quantité minimale de commande | Remise sur volume | Jour d'expédition standard ? | Longueur de la table (mm) | Largeur de la table (mm) | Finitions de la surface de la table | Option de câble | Poids propre (kg) | Accessoires |
|---|---|---|---|---|---|---|---|---|---|---|
2,512.82 € | 1 | Disponible | 10 jours | 60 | 60 | Aluminium anodisé noir | 3 : Câble standard 4 m, discret à une extrémité | 1.14 | Boulon à tête hexagonale manchon M4-12 × 4 pièces / Câble standard, 4 m, discret à une extrémité | |
2,472.54 € | 1 | Disponible | 10 jours | 60 | 60 | Aluminium anodisé noir | 4 :Connecteur uniquement | 1.14 | Boulon à tête hexagonale manchon M4-12 × 4 pièces/ Connecteur uniquement | |
2,455.98 € | 1 | Disponible | 10 jours | 60 | 60 | Aluminium anodisé noir | 5 :Sans câble | 1.14 | Boulon à tête hexagonale manchon M4-12 × 4 pièces | |
2,529.93 € | 1 | Disponible | 10 jours | 60 | 60 | Aluminium anodisé noir | 6 : Câble robot 2 m, Connecteurs aux deux extrémités | 1.14 | Boulon à tête hexagonale manchon M4-12 × 4 pièces / Câble robot, 2 m, Connecteur aux deux extrémités | |
2,555.39 € | 1 | Disponible | 9 jours | 70 | 70 | Aluminium anodisé transparent | 8 : Câble robot 4 m, discret à une extrémité | 1.18 | Boulon à tête hexagonale manchon M4-6 × 4 pièces / Câble robot, 4 m, discret à une extrémité | |
2,530.15 € | 1 | Disponible | 9 jours | 70 | 70 | Aluminium anodisé transparent | 9 : Câble robot 2 m, discret à une extrémité | 1.18 | Boulon à tête hexagonale manchon M4-6 × 4 pièces / Câble robot, 2 m, discret à une extrémité |
Assistance technique
Mode de paiement



Fabrication à la demande
Certificats





Copyright © MISUMI Corporation All Rights Reserved.